Động cơ bước là gì và cách thức hoạt động
Từ một đầu phát DVD đơn giản hoặc máy in trong nhà của bạn đến một máy CNC rất phức tạp hoặc Robotic Arm, động cơ Stepper sẽ được tìm thấy ở hầu hết mọi nơi. Khả năng thực hiện các chuyển động chính xác được điều khiển bằng điện tử đã khiến các động cơ này tìm thấy ứng dụng trong nhiều felid như camera giám sát, đĩa cứng, máy CNC , Máy in 3D , Robotics, Robot lắp ráp, Máy cắt laser và nhiều hơn nữa. Trong bài viết này chúng ta hãy tìm hiểu những gì làm cho các động cơ này đặc biệt và lý thuyết đằng sau nó. Chúng tôi sẽ tìm hiểu làm thế nào để sử dụng một cho ứng dụng của bạn.
Giới thiệu về Stepper Motors
Giống như tất cả các động cơ, động cơ servo bước cũng có stato và rôto , nhưng không giống như động cơ DC thông thường, stato bao gồm các cuộn dây riêng lẻ. Số lượng cuộn dây sẽ khác nhau dựa trên loại động cơ bước , nhưng bây giờ chỉ cần hiểu rằng trong một động cơ bước, rôto bao gồm các cực kim loại và mỗi cực sẽ được thu hút bởi một bộ cuộn dây trong stato. Sơ đồ dưới đây cho thấy một động cơ bước với 8 cực stator và 6 cực rôto.
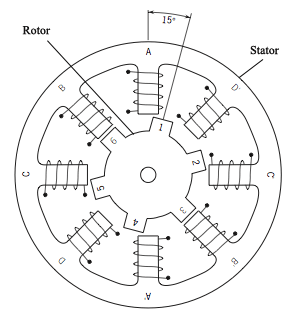
Nếu bạn nhìn vào các cuộn dây trên stato, chúng được sắp xếp theo các cặp cuộn dây, như A và A 'tạo thành một cặp B và B' tạo thành một cặp và cứ thế. Vì vậy, mỗi cặp cuộn dây này tạo thành một nam châm điện và chúng có thể được cấp năng lượng riêng bằng cách sử dụng mạch điều khiển.Khi một cuộn dây được cấp năng lượng, nó hoạt động như một nam châm và cực rôto được đặt thẳng hàng với nó, khi rôto quay để tự điều chỉnh để thẳng hàng với stato, nó được gọi là một bước . Tương tự như vậy bằng cách cung cấp năng lượng cho các cuộn dây theo trình tự, chúng ta có thể xoay động cơ theo các bước nhỏ để tạo ra một vòng quay hoàn chỉnh.
Các loại động cơ bước
Có ba loại động cơ bước chủ yếu dựa trên xây dựng, đó là:
- Động cơ bước miễn cưỡng biến: Chúng có rôto lõi sắt được thu hút về phía cực stato và cung cấp chuyển động bởi sự miễn cưỡng tối thiểu giữa stato và rôto.
- Động cơ bước nam châm vĩnh cửu: Chúng có rôto nam châm vĩnh cửu và chúng bị đẩy hoặc thu hút về phía stato theo các xung được áp dụng.
- Động cơ bước đồng bộ lai: Chúng là sự kết hợp giữa biến đổi miễn cưỡng biến đổi và động cơ bước nam châm vĩnh cửu.
Ngoài ra, chúng ta cũng có thể phân loại động cơ bước là Đơn cực và lưỡng cực dựa trên loại cuộn dây stato.
- Động cơ bước lưỡng cực: cuộn dây stato trên loại động cơ này sẽ không có dây chung. Việc lái loại động cơ bước này là khác nhau và phức tạp và cũng có thể dễ dàng thiết kế mạch lái nếu không có vi điều khiển.
- Động cơ bước đơn cực: Trong loại động cơ bước này, chúng ta có thể lấy tâm của cả hai cuộn dây pha cho một mặt bằng chung hoặc cho một công suất chung như dưới đây. Điều này làm cho nó dễ dàng để lái các động cơ, có nhiều loại trong động cơ bước đơn cực là tốt
Các chế độ hoạt động trong Stepper Motor
Do stator của chế độ bước được xây dựng từ các thanh trượt vuông cặp cuộn khác nhau, mỗi cặp cuộn dây có thể được kích thích theo nhiều phương pháp khác nhau, điều này cho phép các chế độ được điều khiển ở nhiều chế độ khác nhau. Sau đây là các phân loại rộng
Chế độ toàn bước
Trong chế độ kích thích bước đầy đủ, chúng ta có thể đạt được một vòng quay 360 ° đầy đủ với số vòng quay tối thiểu (các bước). Nhưng điều này dẫn đến quán tính ít hơn và vòng quay sẽ không được trơn tru. Ngoài ra còn có hai phân loại trong Kích thích toàn bước, chúng là một bước sóng pha và hai chế độ bật pha .
1. Bước một pha hoặc Bước sóng: Trong chế độ này, chỉ một đầu cuối (pha) của động cơ sẽ được cấp năng lượng tại bất kỳ thời điểm nào. Điều này có số bước ít hơn và do đó có thể đạt được góc xoay 360 ° đầy đủ. Vì số bước ít hơn nên hiện tại tiêu thụ bởi phương pháp này cũng rất thấp. Bảng dưới đây cho thấy trình tự bước sóng cho động cơ bước 4 pha
| Bươc | Giai đoạn 1 | Giai đoạn 2 | Giai đoạn 3 | Giai đoạn 4 |
| 1 | 1 | 0 | 0 | 0 |
| 2 | 0 | 1 | 0 | 0 |
| 3 | 0 | 0 | 1 | 0 |
| 4 | 0 | 0 | 0 | 1 |
2. Bước hai pha: Như tên trạng thái trong phương thức này, hai pha sẽ là một. Nó có cùng số bước với bước sóng, nhưng vì hai cuộn dây được cấp năng lượng tại một thời điểm, nó có thể cung cấp mô-men xoắn và tốc độ tốt hơn so với phương pháp trước đó. Mặc dù một nhược điểm là phương pháp này cũng tiêu thụ nhiều năng lượng hơn.
| Bươc | Giai đoạn 1 | Giai đoạn 2 | Giai đoạn 3 | Giai đoạn 4 |
|
1 |
1 |
1 |
0 |
0 |
|
2 |
0 | 1 | 1 | 0 |
| 3 | 0 | 0 | 1 | 1 |
| 4 | 1 | 0 | 0 | 1 |
Chế độ nửa bước
Chế độ Half Step là sự kết hợp của vít me bi các chế độ một pha và hai pha. Sự kết hợp này sẽ giúp chúng tôi khắc phục nhược điểm đã đề cập ở trên của cả hai chế độ.
Như bạn có thể đoán nó vì chúng tôi đang kết hợp cả hai phương pháp, chúng tôi sẽ phải thực hiện 8 bước trong phương pháp này để có được một vòng quay hoàn chỉnh. Trình tự chuyển đổi cho động cơ bước 4 pha được hiển thị bên dưới
|
Bươc |
Giai đoạn 1 |
Giai đoạn 2 |
Giai đoạn 3 |
Giai đoạn 4 |
|
1 |
1 |
0 |
0 |
0 |
|
2 |
1 |
1 |
0 |
0 |
|
3 |
0 |
1 |
0 |
0 |
|
4 |
0 |
1 |
1 |
0 |
|
5 |
0 |
0 |
1 |
1 |
|
6 |
0 |
0 |
0 |
1 |
|
7 |
1 |
0 |
0 |
1 |
|
số 8 |
1 |
0 |
0 |
0 |
Chế độ vi bước
Chế độ bước micro là phức tạp của tất cả, nhưng nó cung cấp độ chính xác rất tốt cùng với mô-men xoắn tốt và hoạt động trơn tru. Trong phương pháp này, cuộn dây sẽ được kích thích với hai sóng hình sin cách nhau 90 °. Bằng cách này, chúng ta có thể điều khiển cả hướng và biên độ của dòng điện chạy qua cuộn dây giúp chúng ta tăng số bước mà động cơ phải thực hiện cho một vòng quay hoàn chỉnh. Bước vi mô có thể cao tới 256 bước để thực hiện một vòng quay hoàn chỉnh, điều này làm cho động cơ quay nhanh hơn và mượt mà hơn.
Cách sử dụng động cơ bước
Đủ lý thuyết nhàm chán, giả sử ai đó cung cấp cho bạn một động cơ bước nói 28-BYJ48 nổi tiếng và bạn thực sự tò mò để làm cho nó hoạt động. Đến lúc này bạn sẽ hiểu rằng không thể làm cho các động cơ này quay bằng cách chỉ cung cấp năng lượng cho chúng thông qua một nguồn cung cấp, vậy bạn sẽ làm thế nào?
Chúng ta hãy xem động cơ Stepper 28-BYJ48 này .
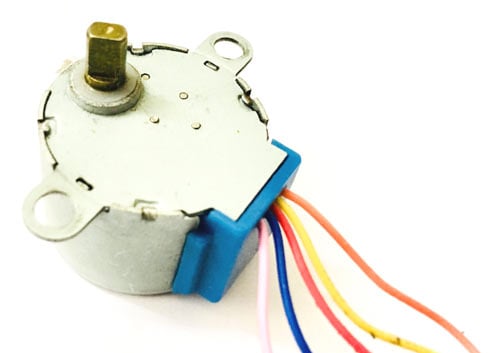
Được rồi, không giống như một động cơ DC bình thường, cái này có năm dây với tất cả các màu sắc lạ mắt ra khỏi nó và tại sao nó lại như vậy? Để hiểu điều này, trước tiên chúng ta nên biết một bước mà chúng ta đã thảo luận. Trước hết động cơ bước không quay , chúng bước và vì vậy chúng còn được gọi là động cơ bước . Có nghĩa là, họ sẽ chỉ di chuyển một bước tại một thời điểm. Những động cơ này có một chuỗi các cuộn dây có trong chúng và những cuộn dây này phải được cung cấp năng lượng theo một kiểu cụ thể để làm cho động cơ quay. Khi mỗi cuộn dây được cấp năng lượng, động cơ sẽ thực hiện một bước và một chuỗi năng lượng sẽ làm cho động cơ thực hiện các bước liên tục, do đó làm cho nó quay. Chúng ta hãy xem các cuộn dây có trong động cơ để biết chính xác nơi mà các dây này đến từ đâu.
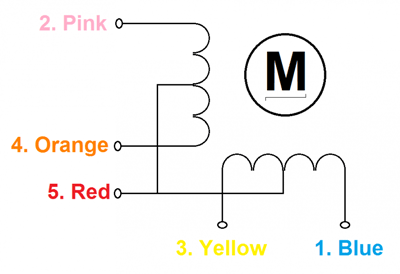
Như bạn có thể thấy động cơ có sự sắp xếp cuộn dây 5 cực đơn cực . Có bốn cuộn dây phải được cấp năng lượng theo một trình tự cụ thể. Các dây màu đỏ sẽ được cung cấp + 5V và bốn dây còn lại sẽ được kéo xuống đất để kích hoạt cuộn dây tương ứng. Chúng tôi sử dụng bất kỳ bộ vi điều khiển nào để cung cấp năng lượng cho các cuộn dây này theo một trình tự cụ thể và làm cho động cơ thực hiện số bước cần thiết. Một lần nữa, có nhiều trình tự bạn có thể sử dụng, thông thường sử dụng 4 bước và để kiểm soát chính xác hơn, điều khiển 8 bước cũng có thể được sử dụng. Bảng trình tự cho điều khiển 4 bước được hiển thị bên dưới.
|
Bươc |
Cuộn dây năng lượng |
|
Bước 1 |
A và B |
|
Bước 2 |
B và C |
|
Bước 3 |
C và D |
|
Bước 4 |
D và A |
Vậy bây giờ, tại sao động cơ này được gọi là 28-BYJ48 ? Nghiêm túc!!! Tôi không biết. Không có lý do kỹ thuật cho động cơ này được đặt tên như vậy; có lẽ chúng ta không nên lặn sâu hơn vào nó. Chúng ta hãy xem xét một số dữ liệu kỹ thuật quan trọng thu được từ bảng dữ liệu của động cơ này trong hình dưới đây.
Dữ liệu kỹ thuật từ biểu dữ liệu của Stepper Motor

Đó là một cái đầu chứa đầy thông tin, nhưng chúng ta cần xem xét một vài cái quan trọng để biết loại bước nào chúng ta đang sử dụng để có thể lập trình nó một cách hiệu quả. Đầu tiên chúng ta biết rằng đó là một động cơ Stepper 5V vì chúng ta cung cấp năng lượng cho dây Đỏ với 5V. Sau đó, chúng ta cũng biết rằng nó là một động cơ bước bốn pha vì nó có bốn cuộn dây trong đó. Bây giờ, tỷ lệ thiết bị được đưa ra là 1:64. Điều này có nghĩa là trục mà bạn nhìn thấy bên ngoài sẽ thực hiện một vòng quay hoàn chỉnh chỉ khi động cơ bên trong quay trong 64 lần. Điều này là do các bánh răng được kết nối giữa động cơ và trục đầu ra, những bánh răng này giúp tăng mô-men xoắn.
Một dữ liệu quan trọng khác cần chú ý là Góc sải chân: 5.625 ° / 64. Điều này có nghĩa là động cơ khi hoạt động theo trình tự 8 bước sẽ di chuyển 5.625 độ cho mỗi bước và sẽ mất 64 bước (5.625 * 64 = 360) để hoàn thành một vòng quay đầy đủ.
Tính toán các bước trên mỗi vòng quay cho động cơ bước
Điều quan trọng là phải biết cách tính các bước trên mỗi vòng quay cho động cơ bước của bạn bởi vì chỉ khi đó bạn mới có thể lập trình / lái nó một cách hiệu quả.
Giả sử chúng ta sẽ vận hành động cơ theo trình tự 4 bước nên góc sải sẽ là 11,25 ° vì nó là 5,625 ° (được đưa ra trong biểu dữ liệu) cho chuỗi 8 bước, nó sẽ là 11,25 ° (5,625 * 2 = 11,25).
Bước trên mỗi vòng quay = 360 / góc bước Ở đây, 360 / 11,25 = 32 bước trên mỗi vòng quay.
Tại sao chúng ta cần các mô-đun Driver cho Stepper Motors?
Hầu hết các động cơ bước sẽ hoạt động chỉ với sự trợ giúp của một mô-đun trình điều khiển. Điều này là do mô-đun bộ điều khiển (Vi điều khiển / Mạch kỹ thuật số) sẽ không thể cung cấp đủ dòng từ các chân I / O của nó để động cơ hoạt động. Vì vậy, chúng tôi sẽ sử dụng một mô-đun bên ngoài như mô-đun ULN2003 làm trình điều khiển động cơ bước . Có nhiều loại mô-đun trình điều khiển và đánh giá của một loại sẽ thay đổi dựa trên loại động cơ được sử dụng. Nguyên tắc chính cho tất cả các mô-đun trình điều khiển sẽ là nguồn / chìm đủ dòng để động cơ hoạt động. Ngoài ra, còn có các mô-đun trình điều khiển có logic được lập trình sẵn trong đó, nhưng chúng tôi sẽ không thảo luận về nó ở đây.
Nếu bạn tò mò muốn biết cách xoay động cơ bước bằng một số vi điều khiển và IC điều khiển, thì chúng tôi đã đề cập đến nhiều bài viết về hoạt động của nó với các bộ vi điều khiển khác nhau:
Bây giờ tôi tin rằng bạn có đủ thông tin để kiểm soát bất kỳ động cơ bước nào mà bạn yêu cầu cho dự án của mình. Chúng ta hãy xem xét ưu điểm và nhược điểm của động cơ Stepper.
Ưu điểm của động cơ Stepper
Một lợi thế lớn của động cơ bước là nó có khả năng kiểm soát vị trí tuyệt vời và do đó có thể được sử dụng cho ứng dụng điều khiển chính xác. Ngoài ra, nó có mô-men xoắn giữ rất tốt làm cho nó trở thành một lựa chọn lý tưởng cho các ứng dụng robot. Động cơ bước cũng được coi là có tuổi thọ cao hơn động cơ DC hoặc servo bình thường.
Nhược điểm của Stepper Motors
Giống như tất cả các động cơ, Stepper Motors cũng có những nhược điểm riêng, vì nó quay bằng cách thực hiện các bước nhỏ nên nó không thể đạt được tốc độ cao. Ngoài ra, nó tiêu thụ năng lượng để giữ mô-men xoắn ngay cả khi nó là lý tưởng do đó làm tăng mức tiêu thụ năng lượng.